
灯具可藉由调节输出光线明暗的方式来广播定位讯号,这种通讯概念很早就已被提出,例如光纤的应用;但直到最近,业界才开始能有效的调节一般照明灯具与灯泡所发出的高功率光线。而促成这项变革的技术就是高功率白光发光二极体(LED),其迅速取代萤光灯成为未来照明技术的首选,因为它的能源效率相对较高、成本更低、对环境造成的冲击也比较小。
LED灯要发挥良好定位功能的前提为可见光通讯(VLC)讯号必须妥善设计,以确保不会影响主要的照明功能。关键的设计考量因素,包括对人类视觉的影响、能够支援较大的调光范围、省电,以及能与既存的硬体相容。
Lumicast传讯机制具备双重功能
为此,高通(Qualcomm)提出了名为Lumicast的可见光定位技术,将针对上述问题提出对应解答。不同于体积小巧的萤光灯管,LED属于半导体元件,因此输出的光线能以相对更高的频率进行调节。以kHz等级的频率来进行讯号调变,不只能确保VLC讯号不会产生肉眼可察觉的灯光闪烁,还能以定位所需的数据率来传递资讯。
Lumicast透过简单的二进制调变,让VLC讯号不会影响到灯具的省电性,这种调变机制使用了本身也是可调光LED驱动电路整合元件的升压式转换器,这样的设计不仅节省讯号资源,能和现有驱动电路硬体相容,还能与各种标准调光方法自然并存。
Lumicast的通讯机制在设计时就考虑到这些限制,运用这些条件,LED灯具就能同时满足提供省电照明的主要功能,以及扮演定位中枢的角色。
VLC定位拥有独特优势
每个灯具所传送的VLC讯号都拥有一个独一无二的识别标签(Identifier),并可用来与场所内其他灯具做出区别。当系统启用时,就会建立起所有灯具与其识别标签的位置图,该位置会储存在远端伺服器,当要判断位置时,行动装置必须先下载位置图,每当要透过VLC讯号找出某特定灯具时,都得参照这份位置图。识别标签若非储存在驱动元件内部,就是由外部系统提供,像是从蓝牙无线网路取得。灯具可定时切换传送新的识别标签,以防范有人未经授权使用此定位功能。藉由建立这种“滚动式ID”机制,企业能防止未经授权的第三方行动应用在自家场所提供定位服务。
在Lumicast的通讯机制中,手机的关键运作元件为CMOS影像感测器,它经过设定后,能从一连串所拍到特定灯具的影片画面中撷取出一段时间的VLC讯号变化,收到的VLC讯号经过智慧手机进行解调变与解码后,产生一个独一无二的灯具识别标签(图1)。此外,只要在影像感测器视野可及范围内,还能从拍到的多个灯具的影片画面中同步撷取出多个VLC讯号,这一点很重要,因为手机或行动装置能透过多个独立的定位资讯来源确认所在位置并进行校正(图2)。
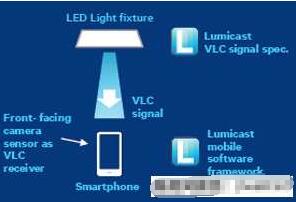
图1 灯具识别标签产生示意图
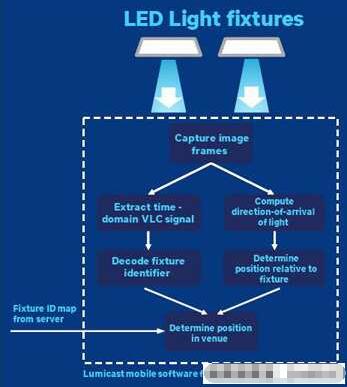
图2 LED光定位校正过程
不过,光是仰赖灯具的识别标签,智慧型手机只能判断出误差范围在几公尺内的大概位置。撷取到的影片画面必须进行更多量测与处理,才能将误差范围缩小在几公分内。
这也正是影像感测器的擅长之处,它能精准量测接收到的光线讯号,影像感测器的每个画素都会累积来自极窄范围方向的光线能量,进行像素层级的分析,接收器就能精准判断来自一个或多个灯具的光线方位。如此一来,装置就能推算出和灯具之间的相对位置,且让误差范围在数公分之内。这里用到的讯号处理技巧类似射频无线电接收器的“波束成型”,差别在于天线数量数以百万计,因此方位的精准性远远高于射频无线电。
藉由精准预测和灯具之间的相对位置,再加上根据解码后识别标签所判断的灯具位置,行动装置就能辨别场所中的全域位置,且误差范围仅在数公分左右。 VLC定位并不会有其他定位技术采用量测模型面临到的不确定性,因为射频讯号强度的定位法无法预测多重讯号传递路径,但VLC定位仅使用无障碍直视(Line-of-sight)传递路径,故能透过影像感测器精准地判断,这也是让可见光通讯VLC定位法有更多优点的原因。本文后续会再详细讨论其他技术;现在,先列举出VLC技术的一些关键特点如下。
三轴向定位
Lumicast的一项关键特点就是除了提供装置在水平面的位置,它还提供垂直轴向(Z轴)的位置,这个数据取自于光线抵达的方向,再根据三维向量进行推算。 精准的高度推测有利于更多情况的应用,包括无人机以及仓库和厂房中堆高机的自动导航与操作。
方位
运用光线向量的另一个直接结果,就是装置能判断在水平面(X-Y)上自己面向的方位,也就是装置的方位或偏航角。这个资讯在实务上非常有用,因为它能告知使用者握手机的方向(以及自己面向的方位),相对于场所中其他物体的位置。相比之下,GPS接收器藉由一连串定位资讯来推测使用者面向的方位,这意谓使用者必须一直朝特定方向移动一段时间,才能知道自己面朝的方向;运用Lumicast的可见光通讯(VLC)技术,只须第一次撷取定位资料就能判断出方位/前进方向。
等待时间与更新率
一般的室内定位系统采用射频讯号,因此必须花一段时间与透过一段距离进行多次量测,才能校正出位置。运用Lumicast的VLC定位技术,完成第一次校正的时间仅须100毫秒,而且更新率可高达30Hz。这对人类使用者来说,可确保快速且即时的应用,甚至许多要求严密复杂的无人机/机器人导航应用也能应付自如。
扩充性
定位系统必须在智慧型手机与基础设施之间进行双向通讯,却无法因应行动使用者与基础设施基地台数量扩充。这是因为每个智慧型手机与基础设施之间的通讯都会对其他智慧手机产生干扰,在进行定位时就会相互干扰。在Wi-Fi频段进行RTT定位时,讯号干扰也会造成整体WLAN处理量的下滑。VLC定位本身就具有扩充性,因为它采用单向通讯,不论场所中有多少使用者或发送器同时运行,运作效能都不会衰减。
运用相机感测器作为接收器会有一项明显的限制:当相机的视野被挡住时,就无法收到讯号,因而也无法运算出位置。正常使用情况下,因为遮挡或讯号死区产生讯号/定位停摆的机率微乎其微;不过若是将智慧型手机置于口袋或提包,就一定会发生定位停摆的状况。
即便在大多数情况下,都是使用者主动以智慧型手机来进行导航与位置搜寻;但仍有一些使用情况,像是手机待机、使用者没有主动握着手机,这时若定位准确,使用情境就能改善。举例来说,零售店面想要追踪来客移动,藉以进行位置分析或发送位置型促销讯息/折价券,但此时若客人的手机一直放在口袋/提包内就无法达到这个效果;由于无法使用VLC来应付这类使用情境,因此必须采用其他定位系统。在下个章节中我们将探讨这些替代定位系统,以及VLC定位技术如何提升其效能。
多种技术混搭 背景定位难题有解
当行动应用处在前景模式,而使用者主动使用智慧型手机,VLC技术就能达到卓越的定位效能。为了解决处在背景模式时的定位难题,Lumicast就必须依赖其他定位方法。笔者接下来将审视一些适合这种情境的技术,并且讨论一些面临到的基本问题,以及如何运用VLC定位技术来提升其表现,达到更好的效能与扩充性。
谈到背景定位就免不了涉及隐私与使用者经验的问题。首先,必须明确询问使用者是否愿意加入背景定位服务。这点在前景服务也是一样,只不过当背景定位服务在启动时比较不引人注意而已。第二,行动应用必须避免对手机电池电力产生大量损耗,因为使用者认为应用程式不可以太过耗电。此外,背景定位系统必须够精准,避免发出过多错误的行动警讯和通知。任何提供背景定位的系统都必须将这些因素纳入考量。
包括Wi-Fi基地台或蓝牙无线电元件发出的射频讯号,都是背景定位的自然选择,因为即使装置在使用者的口袋或手提包内时,仍能有效接收绝大多数射频讯号,以射频讯号强度定位的方法,是以在场所中的每个位置去比较所接收到的讯号强度和预期的讯号强度来做应用。
如本文之前所述,实务上不可能精准地预测或模拟出射频讯号强度,因为讯号传递具有多重路径的性质,接收到的射频讯号等于许多个别射线的总和,各自透过环境中不同的实体路径传到目的地。即使环境中每个物体的位置都是已知,想要精准预测这些传递路径依然极为困难。此外,每当环境中人或物体出现移动,甚至连人拿着或戴着装置的方式有所变动,讯号传递就会有所改变,就会导致估算的位置出现偏差与杂讯。
要将多重路径的影响减至最低,就必须经常更新场所的指纹图(Fingerprint Map),如介绍中所述,若是采用人工调查,这种方法不仅代价高昂且极容易出错。反观运用Lumicast的技术,这个程序就能大幅改进。只要能用VLC技术产生定位结果,实质上都能反映实际状况,可用来建立更精准的指纹图。
当使用者在场所中移动并运用VLC定位功能时,系统会自动执行这个程序,如此一来,就能视情况使用前景模式来改进背景定位系统的精准度。此外,若建构指纹图所采用的机器学习演算法是在远端伺服器上运行,那么所有行动装置都能向伺服器传输资料,这样的方法能大幅改进精准度,并降低建立指纹图所耗费的时间与成本。
另一个面临类似技术难题的定位法,就是量测室内环境周围空间的磁场。这种定位法的主要挑战是调查必须达到更高的精准度,因为周围磁场要比射频讯号的传递更难以建立模型。感测器出现的各种量测偏差也非常难排除,因为它们会随着周围磁场的波动而改变。
想要减少这些误差,通常需要让使用者以规定的方式握持手机,即便如此,最好的定位精准度也只能达到数公尺等级。
如同射频讯号强度的定位方法,运用VLC定位技术作为基准,再辅以磁场指纹图,即可大幅改进系统的效能,系统启动的时间与成本也有所改进。此外,由于Lumicast的VLC技术能支援装置在空间中的六个自由度,因此就能取得磁场的方位资讯,用来校正磁场感测器的各项偏差。
有许多定位法依赖装置内部的惯性感测器来推测和上一次定位校正之间的相对位置。但这些方法会面临许多误差,而且会随着时间逐渐累积,因为现今行动装置中采用低成本微机电系统感测器,不可避免地会出现这类量测偏差。为了将误差累积或漂移的效应减至最小,感测器在独立模式下运行的时间应尽可能减少。VLC定位技术在这方面能派上用场,当应用在前景模式运作时能不时提供位置校正,而以感测器运行的惯性导航系统则能定时重置与校正。
上述所有定位方法都能合并运作(图3)。事实上,VLC可同时用来训练与校正这些系统。由于量测来源彼此独立,并用这些系统会让整体效能有增无减。
误差范围可缩小至数公分 LED定位准度直追GPS2
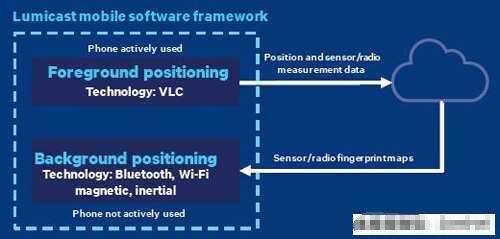
图3 前景定位与背景定位的合并运作架构
以照明建构数位服务平台
本文介绍一种新颖的定位系统,运用照明设备作为定位发送器的基础设施。许多因素让灯具成为定位发送器的绝佳选择,全都衍生自照明扮演的主要角色:
.由主电源供电(不须定期更换电池)
.能在场所中提供跨墙的讯号覆盖率
.紧密布建
.在环境中拥有绝佳的无障碍视野
.很容易建立位置地图,且鲜少会移动
正是这些属性让照明基础设施成为感测器与无线电的理想安装目标,加上在行动装置与云端上运行的软体,即可建构出一个完整的端至端平台,供业者提供各种新类型服务。藉由定位作为基石,这类服务还能纳入判断人与物体情境与状态的功能,目标为建构出理想的实体环境,能感知在居住其中的人们所想的需求与期盼,并加以回应。
这类型态的服务正是科技界过去几年提及的环境智能(Ambient Intelligence),如今照明产业跨出第一步,将相机感测器整合至户外灯具,以支援包括寻找停车位在内的使用情境。虽然这种系统尚处于发展初期,其前景非常看好。基于许多其他因素,LED照明的市场加速发展,低成本感测器与无线电元件全面普及,以及行动技术在消费市场的遍地开花,可以看到分散式运算的新时代正全面启航。
(本文作者任职于高通)


