
根据德国联邦高速公路研究所(BASt)的研究,夜间在乡村道路上死亡的行人是白天的5倍。另一项来自BASt的数据同样令人震惊:只有20%的汽车旅行是在晚上进行的。
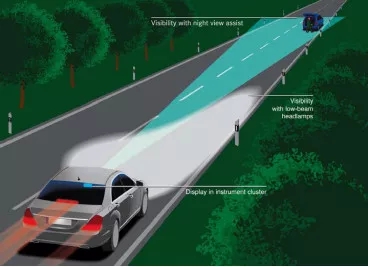
图1 2005夜视辅助
梅赛德斯于2005年推出了夜视系统“夜景辅助”,该系统在夜间视野增长了两倍。它的近红外技术可以使得到的图像在可视光线下尽可能接近可视图像,保证任何司机都能看到。由于物理效果,大多数深色的纺织品在近红外光下变得明亮,这使得行人在夜视图像中表现为明亮的形状,如图1所示。2006年,梅赛德斯推出了智能光系统,该系统的光功能由电脑控制,包括五种照明功能:乡村模式、高速公路模式、增强雾灯、主动光功能和转弯灯功能。2009年引入了一种光学制导,以实现快速准确发现行人。一种识别算法在夜视图像中识别行人并将其标记为矩形标记,如图2所示。

图2 2009带有行人识别系统的夜视系统
2009年,智能灯光系统的自适应远光灯协助调整前照灯的范围,按照距离识别迎面而来的车辆或行人的多目摄像头,与夜视摄像机分开(如图3所示)。该系统是第一次实现一个完整的计算机控制照明系统,该系统的前照灯照明可以指向任何对象,特别对于解决路边行人的识别问题,具有显著作用。
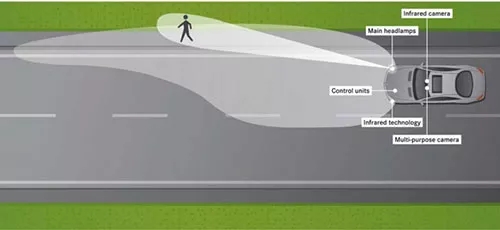
图3 聚光灯功能
2、系统设计
2.1高层需求
首先,在检测算法的能力范围内任何行人都应该被照明完全覆盖,特别是在汽车的乘客一侧的行人应该比在司机侧的行人更需要准确检测。由于缺乏反射性的对比,照亮一个深色的行人并不能提高能见度。为了引导司机的视线,需要一个闪烁的照明,频率接近于2赫兹的人类视觉系统具有最高频率灵敏度。该系统不应使其他交通参与者眼花缭乱,例如其他车辆的驾驶员。如果行人的照明会撞到其他车辆,照明将立即中止。
2.2 功能设计
如图3所示,三个系统协同实现了聚光灯功能:夜景辅助+夜视系统,自适应高光束辅助自动光控制系统和智能光系统的电脑控制光束。
夜视系统将检测行人并实现实时跟踪,智能照明系统的乘客侧投影模块将形成聚光灯,并将其引导至行人。聚光灯将不断从夜视系统接收有关行人的最新位置信息。该信息将以夜视系统的帧率的一半发布,以保证聚光灯的平滑移动。如果聚光灯打在行人身上,那么在大约2.8赫兹的照射下,就会产生一个高达四次的光照序列。自适应高光束辅助的多用途摄像机也将根据其帧率发布其他车辆的信息。行人的位置和其他车辆的位置是连续比较的,如果行人的照明会影响另一辆车,照明顺序被中止。
从夜视系统的摄像头到投影模块的视差,和从夜视系统到投影模块的旋转机构所积累的延时,都需要得到补偿。视差的补偿至少需要一个粗略的估计行人到夜视摄像机的距离。行人检测算法通常可以从触发检测的检测器实例(“stripe”)中提取一个距离估计值。需要过滤的角度和距离测量,以防止投影模块振动。通过对夜视系统的内部跟踪来预测位置信息,从而弥补了时间上的延时。
3、头灯
3.1聚光灯模块的一般要求
为了突出潜在的危险,驱动程序最重要的参数是对象的可见性和反应时间。可见性是由亮度和对比度所决定的。然而,我们能设计的唯一参数是照度。由于反应时间非常有限,并且已经受到车内检测算法和数据流的影响,前照灯应尽可能快的反应。因此,LED阵列前照灯将是理想的解决方案。
3.2 技术方法
除了led阵列前照灯外,还可以考虑机械解决方案。道路上或附近的许多危险可以在低于250ms的标准模块内照明。原则上,一个更小、更快速的专用附加聚光灯模块可以使用一个1mm芯片的LED实现。由于这种方法需要在前照灯外壳内增加额外的空间,并引入额外的成本。我们不认为在许多汽车上可行。
4、系统测试结果
实验装置如图4所示,图5显示了在方法过程中与夜视摄像机拍摄的实验装置的图像,并突出显示了行人。参与者驾驶一辆奔驰s级车,配备了聚光灯功能。以每小时70公里的速度行驶(使用限速器功能),向静止的车辆行驶。一个穿着深色衣服的行人站在对面车辆后面的一个可变距离上。由于面对车辆引起的眩光,行人在进场时最初是不可见的。有三种可能的行人位置:一是面对车辆的尾部,二是车辆后面30米,三是车辆后面60米。
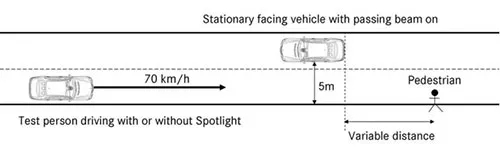
图4 实验装置示意图

图5 面向车辆(静止)和行人(突出显示)的实验设置
参与者的任务是尽可能快地检测行人,通过按下方向盘上的按钮进行登记。然后将记录的车辆速度与第一次按键的时间和行人通过的时间相结合,计算出行人的距离。实验结果如图6所示。由于恶劣天气(雾),四名参与者的数据被排除在外。对于剩下的26名参与者,在所有三个行人位置都可以观察到由于聚光灯功能,检测距离的显著改善。当行人在面对车辆后30米时,平均改善约13米,代表时间优势约0.7秒。
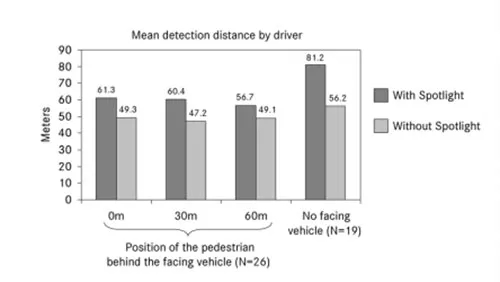
图6 驾驶员行人检测的平均距离
如图6所示,第二个实验的结果与第一个实验的结果相同,其中有19个测试参与者。除了没有面对车辆提供眩光,实验装置是相同的。结果如预期,由于缺少眩光,人们更早的发现了聚光灯和没有聚光灯。然而,聚光灯功能的优势现在更加明显了,平均改进了25米,代表了大约1.3秒的时间优势。
作者:Dr. Ing. Helmuth Eggers, Dr. Jörg Moisel, Mr. Stefan Töpfer, Mr. Stefan Töpfer
编译:史晨阳
指导:林燕丹